В этом посте поговорим о шинах передачи данных по которым общаются электронные блоки управления.
Начнем немного с истории.
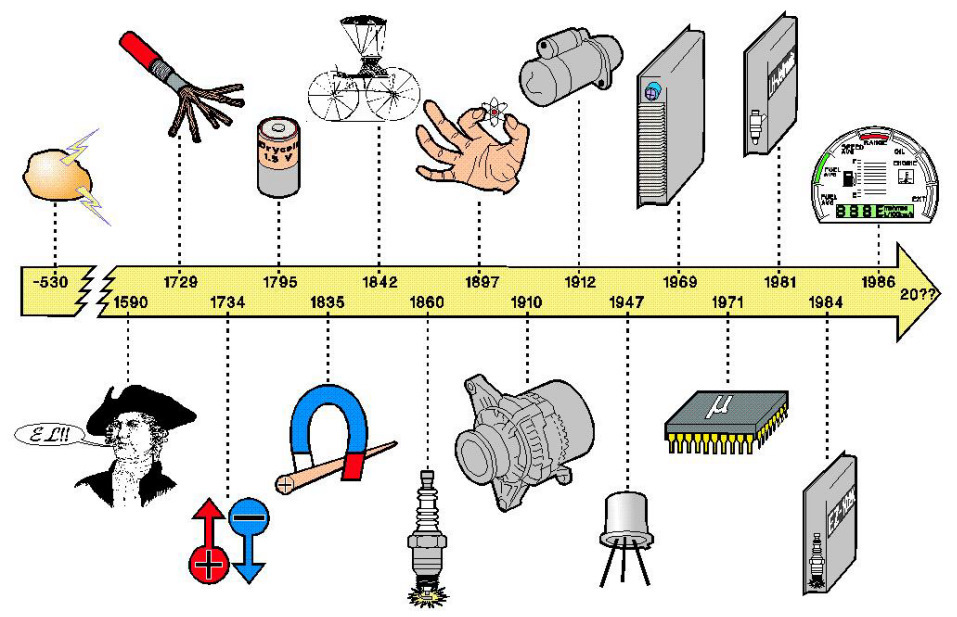
1590 г. Термин "электричество" происшедшее от греческого "электрон", что означает "янтарь" был
впервые использован английским физиком Уильямом Гилбертом, который объяснил разницу между электрическим и магнитным полем.
1729 г. Стивен Грей объясняет разницу между проводниками и изоляторами.
1734 г. Француз Шарль Дюфе ( Charles Dufay ) открыл 2 типа электричества (положительное и отрицательное).
1795 г. Строительство первой электрохимической ячейки Алессандро Вольта в Италии
1820 г. Серия крупных открытий, касающихся магнитных эффектов и взаимосвязи между электрическими и магнитными явлениями.
1835 г. Открытие электромагнитной индукции английским ученым Майклом Фарадеем, который демонстрирует, что ток создается переменным магнитным полем (основной принцип работы генератора).
1842 г. Строительство первого электромобиля в Англии.
1860 г. Создание первого ДВС с электрическим зажиганием, распределителем и свечами
зажигания.
1864 г. Джеймс К. Максвелл (шотландец) суммирует законы электромагнетизма в четырех уравнениях — единая теория.
1897 г. Открытие электрона англичанином Джозефом Дж. Томсоном.
1910 г. Производство первого автомобиля с генератором.
1912 г. Производство первого автомобиля со стартером.
1947 г. Разработка первого транзистора
1969 г. Volvo представляет свою первую электронную систему (D-Jetronic) на двигателе B20E.
Это была аналоговая система не оборудованная ни процессором, ни памятью.
1971 г. Разработка микропроцессора Тедом Хоффом (американцем) в лаборатории Intel.
1984 г. Коды неисправности считываются с помощью мигающих светодиодов.
1986 г. Маршрутный компьютер на Volvo 480 использует мультиплексную связь между микропроцессором и дисплеем. Дисплей состоит из 64 индивидуально изменяемых элементов, управление которыми осуществляется с помощью четырех выводов.
Электрические и электронные системы автомобиля относятся к области быстро развивающейся технологии, наиболее передовые системы управления оснащены большим количеством датчиков и исполнительных механизмов. Это создает повышенный спрос на разделение общих данных. Ответом стало развитие сетей передачи данных, которые позволяют справиться с новыми трудностями в этой области.
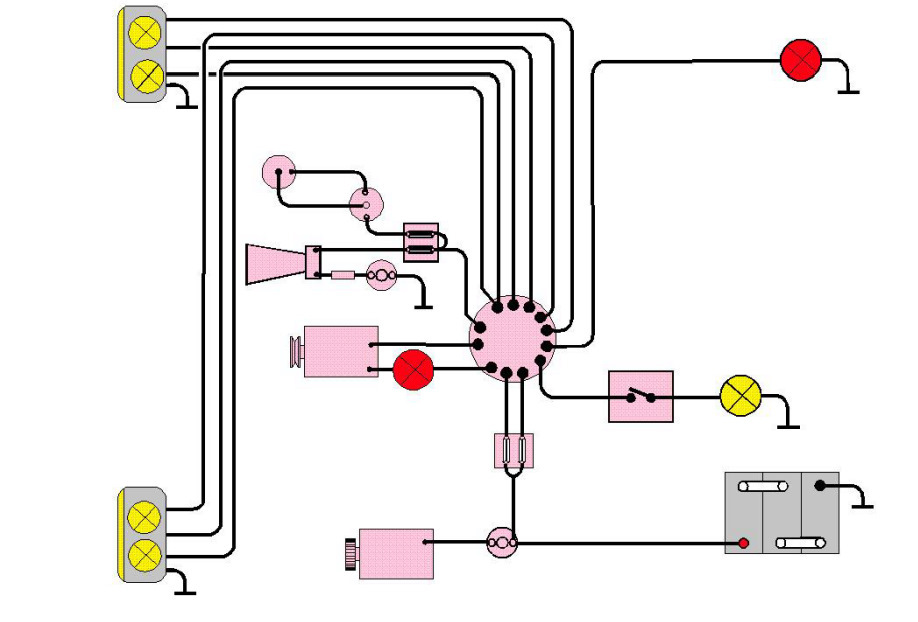
На иллюстрации показана полная схема автомобиля Volvo Jakob ÖV4 1927 г.
А так выглядят схемы современных автомобилей
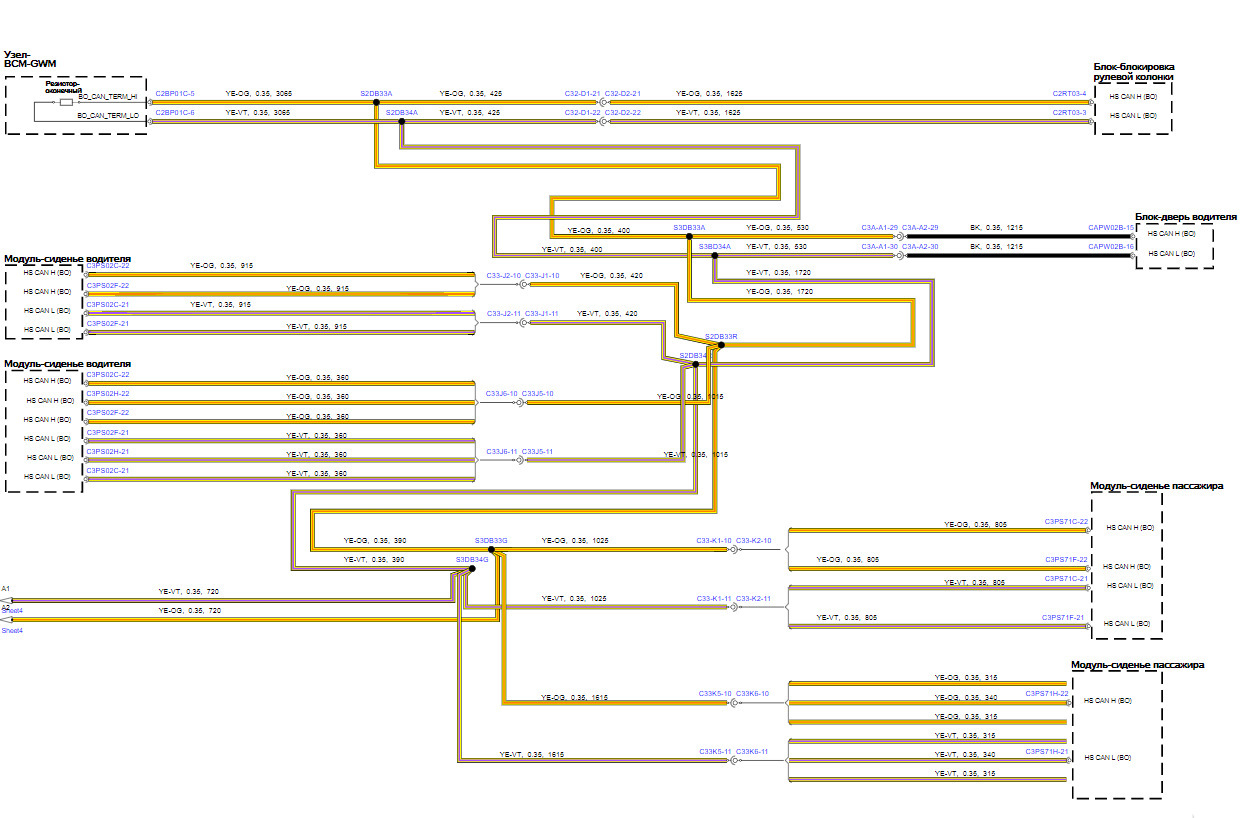
И таких листов около 17 шт у одного автомобиля
Проводка проходит по всему автомобилю, вот пример как проложена кузовная проводка
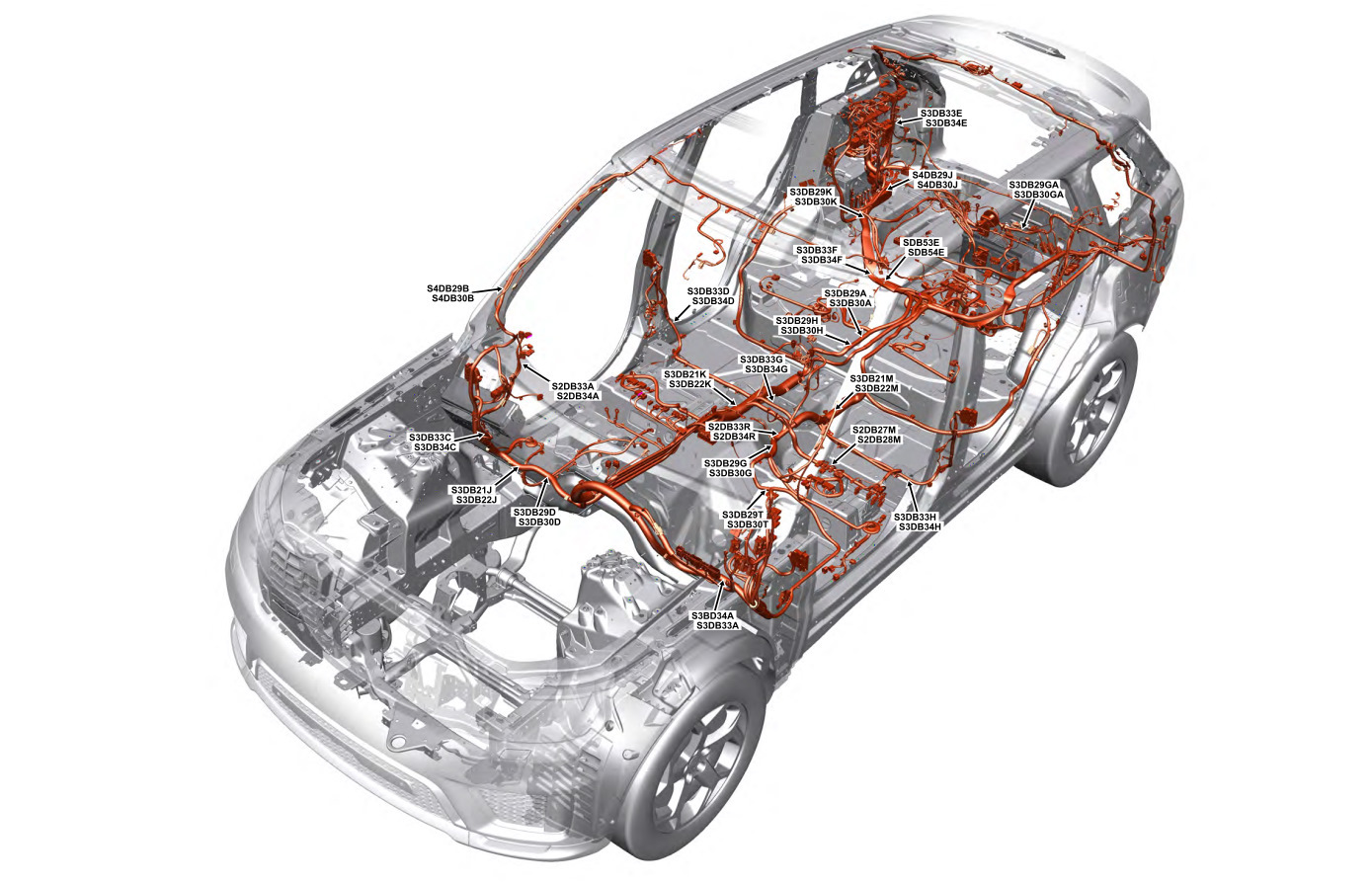
Range Rover кузовная проводка

Блоки управления используют информационные сообщения для обмена данными и логикой по шине сети. Данные передаются в виде серии синхронизированных сигналов в типичном "двоичном коде". В двоичном коде каждому синхронизированному блоку, или "биту", присваивается значение "0" или "1", в зависимости от его напряжения. Каждый блок из восьми битов составляет "байт" (четыре бита составляют "ниббл").
Пример байта — 00010111.
Скорость передачи данных измеряется в битах в секунду (бит/с). Например, если сеть передает данные со скоростью 2,4 кбит, это означает, что каждую секунду передается 2400 битов информации. Следует помнить о том, что один бит является двоичным значением 0 или 1, поэтому каждую секунду передается определенное сочетание этих 2400 нулей или единиц.
Шина CAN
Локальная сеть контроллеров (CAN) была впервые введена в автомобильной промышленности в 1992 году компанией Bosch. Теперь CAN — это международный стандарт, широко используемый за рамками автомобильной промышленности.
Расширенные требования к функциональности в автомобиле, по причине требований законодательств и клиентов, привело к расширению усовершенствованных функций автомобиля. Это, в свою очередь, способствовало развитию систем электрооборудования в направлении повышения их гибкости. В результате исследовательских работ создана локальная сеть CAN. Локальная сеть позволяет передавать и принимать по одному кабелю большое количество различных команд и сообщений. Каждая команда или сообщение обычно нуждались в отдельных проводах. Локальная сеть позволила расширить функциональность системы без увеличения количества проводов.
Количество команд и сообщений, с которыми возможна работа в сети зависит в том числе от скорости сети и продолжительности сообщения/команды. В сети, основанной на сети CAN возможна передача 500 различных сигналов и примерно 100 сообщений. Эти сообщения называются фреймами (Frame). Каждое сообщение может содержать несколько сигналов.
Преимущества сети CAN.
Упрощение добавления функций и установки аксессуаров
Так как модули управления уже подсоединены друг к другу в сети, и в них легко добавить дополнительную информацию, все, что требуется, это:
— Подсоединить датчики к модулю управления
— Подсоединить управляемый компонент к модулю управления
— Загрузить программное обеспечение в модуль управления
— Изменить конфигурацию
Длина проводки и число компонентов, имеющихся теперь в автомобиле — меньше, чем ранее. Примером такого добавления может быть система поддержания постоянной скорости. До внедрения сети установка модулей управления, выключателей, вакуумных насосов, вакуумных усилителей, шлангов и кабельных жгутов была необходимой.
При наличии сети необходима только установка выключателя и загрузка программного обеспечения, которая изменяет конфигурацию автомобиля.
Упрощение внедрения логических функций
Логические функции можно пояснить как "если это произойдет, то должно произойти следующее". Например, система запрограммирована так, чтобы при выходе из строя задней лампы, водителю было подано об этом предупреждающее сообщение на панели приборов.
Единственное, что необходимо сделать для введения логической функции, это внести программные изменения в соответствующие модули управления: в центральный электронный
модуль (CEM на Volvo, CJB на Land Rover) и другие ЭБУ.
Упрощение адаптации системы к требованиям владельца автомобиля и рынка сбыта
Функции могут меняться в соответствии с пожеланиями автовладельца при заказе автомобиля, а так же требованиями рынка сбыта. Для примера можно взять задние противотуманные фонари. В одних странах используются два задних противотуманных фонаря, а в других — только один, со стороны водителя. Раньше требовалось хранить запас различных запчастей для разных рынков сбыта. Сейчас же можно использовать одинаковые запчасти для всех рынков сбыта, выполняя программирование системы в соответствии с требованиями конкретного рынка сбыта.
Для программирования всего модельного ряда можно использовать единую базовую
систему
Похожие сети могут быть использованы для большого количества различных автомобилей.
Единственное отличие такого автомобиля заключается в следующем:
— Компоненты (модули управления, управляемые датчиками компоненты, и т.д.), подсоединенные к системе
— Какие компоненты что делают.
— Какие компоненты/функции являются стандартными, дополнительными и вспомогательными
— Конфигурация/программирование системы.
Существует высокоскоростная шина CAN и среднескоростная.
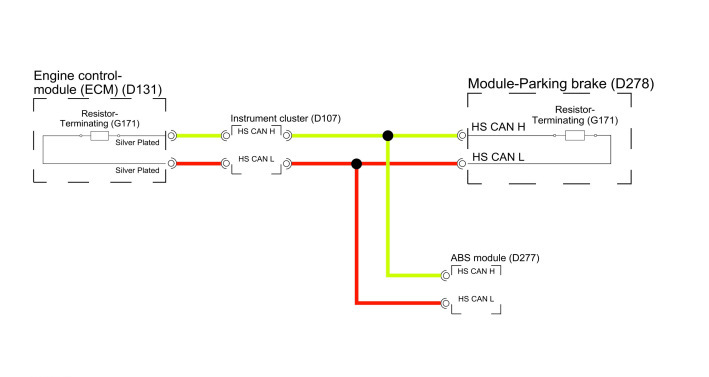
В сеть входит определенное количество модулей (называемых еще узлами), связанных один с другим линиями коммуникации. Каждый модуль управления получает питание и заземлен индивидуально, и получает сообщения (команды) по двум кабелям коммуникации. В обеих сетях (высокоскоростная и среднескоростная) модули управления подключены на разных шинах.
При обрыве, модули управления не будут осуществлять связь с другими частями сети. Но обрыв на одной ветви отключает один модуль, другие модули в этой части цепи будут продолжать функционировать.
Но как правило при неисправности одного модуля происходит ошибка в других, т.к. они не могут получить нужную информацию от них и в результате выдают ошибку. Например, если произойдет обрыв шины CAN блока ABS, то другие системы как пневматическая система, динамическая стабилизация не смогут работать корректно. В результате на панели приборов высветиться много значков неисправности, не только знак ABS.
Как писал ранее сеть состоит из двух частей.
Высокоскоростная сторона (HS CAN) передает сигналы (сообщения) между центральным электронным модулем (CEM) и модулями управления в основном в отсеке
двигателя. Среднескоростная сторона (MS CAN) передает сигналы/сообщения между
центральным электронным модулем (CEM) и модулями управления салона и в отсеке багажника.
Скорость передачи данных HS CAN = 500 кбит/с
Скорость передачи данных MS CAN = 125 кбит/с
Для подавления электрических отражений и помех в локальной сети CAN установлены согласующие резисторы (по одному на каждом окончании высокоскоростного и низкоскоростного участков локальной сети), которые обеспечивают сопряжение CAN H и CAN L локальной сети. Каждый согласующий резистор имеет сопротивление 120 Ом.
Напряжения между CAN L и "массой", среднее значение, приблизительно равно 2,3 В.
Напряжения между CAN H и "массой", среднее значение, приблизительно равно 2,8 В.
При исправной шине, измеряя на диагностическом разъеме, сопротивление 60 Ом.
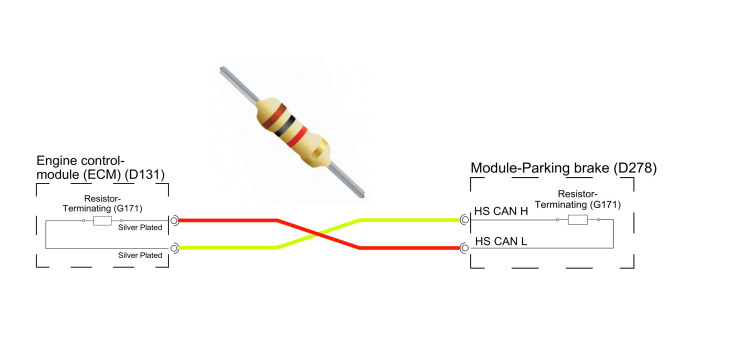
Коммуникация осуществляется по двум кабелям. Эти два кабеля скручены вместе.
В сети могут возникать конфликты, когда несколько модулей управления хотят передать сообщение одновременно, например, когда водитель нажимает на тормоз, и пассажир в переднем сидении в это время меняет установки климата. Чтобы функции выполнялись безупречно, эти сообщения должны быть установлены в порядке приоритета. Кроме того, время задержки, возникшее в данной ситуации должно быть в определенных рамках. Клиент не должен ощущать медленного выполнения функции.
Чтобы разрешить проблемы, касающиеся конфликтов и временных задержек, имеется приоритетный порядок сообщений, с тем чтобы обеспечить хорошую функциональность.
В случаях когда шина повреждена (обрыв провода, КЗ на массу или цепь питания) провода ремонтируются путем скрутки и изоляции провода или сращивание специальными обжимками. При ремонте необходимо учитывать, что шина CAN это витая пара и нужно соблюсти эти "витки".
Шина LIN
Сеть состоит из нескольких модулей управления, связанных один с другим коммуникационным кабелем. Модули управления имеют отдельное питание, заземлены и обмениваются информацией в любом направлении по коммуникационным кабелям. При обрыве коммуникационных кабелей, модули управления не смогут больше осуществлять коммуникацию с другими модулями. Но модули перед обрывом на кабеле, смогут по-прежнему осуществлять коммуникацию. На шине LIN всегда один модуль управления является главным модулем. Другие модули на той же шине LIN являются подчиненными модулями.
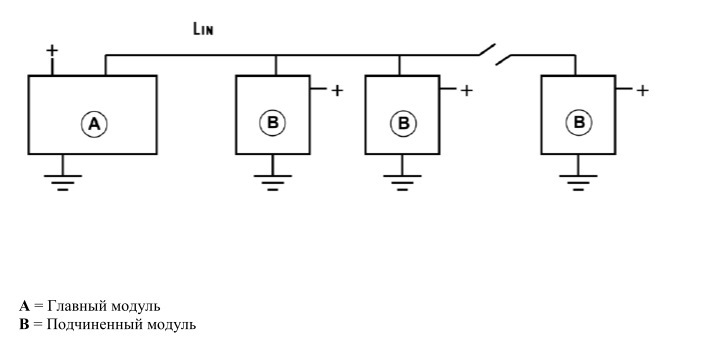
Шина LIN
Преимущество использования шины LIN заключается в том, что вместо использования одного кабеля для каждой функции, последовательная коммуникация по сети возможна благодаря сотням сигналов и функций, которые управляются или считываются на одном и том же кабеле. Такую сеть легче приспособить к системе по запросу клиента и рынка. В отношении к количеству функций и подключенным компонентам, длина электропроводки будет короче и электрическая система проще, и удобнее для обслуживания в сравнении с прямым подключением.
LIN функционирует в обоих направлениях, это означает, что информация может передаваться в обоих направлениях. Модули могут передавать информацию поочередно.
Протокол LIN является дополнением CAN. LIN представляет собой более дешевый вариант в сравнении с CAN и используется там, где скорость передачи и производительность не являются определяющими.
Скорость передачи шины LIN составляет 9,6 кбит/с.
В наших автомобилях, блок управления климат контролем, управляет моторчиками заслонок по локальной шине LIN. Блок управления является главным блоком, а моторчики являются подчиненными. В большинстве случаев главный узел можно идентифицировать, поскольку он оснащен дополнительным соединением по шине CAN, что позволяет собирать другие данные и обрабатывать их для принятия решений. Три подчиненных узла представляют собой мехатронные блоки, которые объединяют в себе рабочие схемы и программное обеспечение с шаговыми двигателями, чтобы управлять заслонками распределения системы отопления и вентиляции.
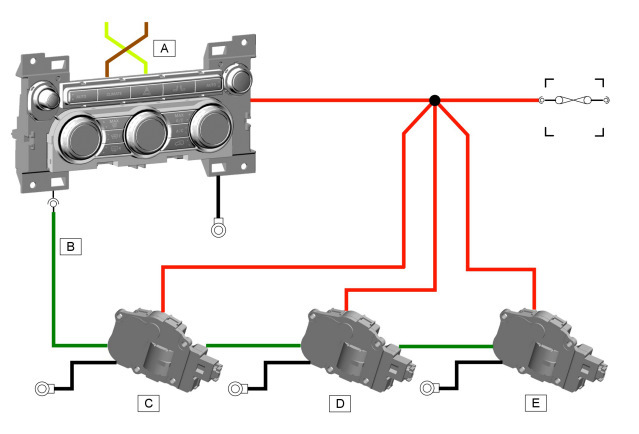
Модули управления, используемые в качестве подчиненных модулей на шинах LIN, поставляются сконфигурированными, и тем самым запрограммированными на определенный режим работы. То есть, например, при замене одного из сервоприводов, важно устанавливать именно тот моторчик который вышел из строя, они не взаимозаменяемые, хотя могут выглядеть так же. Главный блок отправляет сообщение каждому блоку свое, и если вы установите, например моторчик левый на правую сторону, то при регулировке левой стороны у Вас будет регулироваться правая сторона.
Напряжение на коммуникационном кабеле зависит от питающего напряжения. В общем, среднее значение в процессе коммуникации составляет примерно 2/3 питающего напряжения. При нормальном напряжении питания и при нормальной коммуникации среднее значение напряжения в шине LIN лежит в приделе 7-8 В.
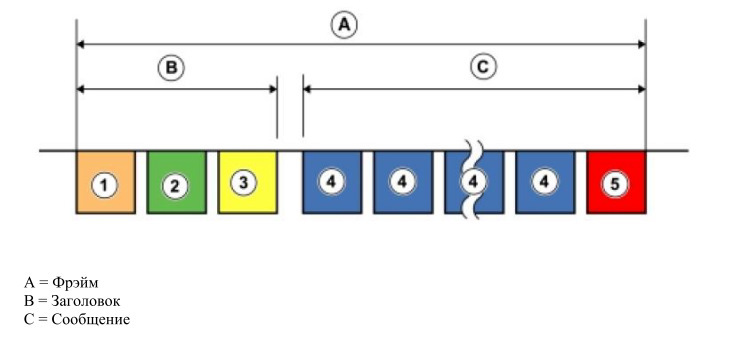
Сообщение шины LIN
Сообщение по сети LIN называется "Frame" и состоит из следующих составных частей:
Прерывание синхронизации.
Используется для пробуждения подчиненного модуля, который находится в спящем режиме.
Поле синхронизации.
Поле синхронизации помогает подчиненному модулю синхронизироваться на частоту главного узла, чтобы передаваемые сообщения принимались правильно.
Поле идентификации.
Содержит информацию об адресе сообщения, размере и содержании сообщения. Все узлы могут считывать сообщение и выполнять действия, но только один модуль имеет право отвечать на сообщение. То, какой модуль имеет такое право (отвечать на сообщение), определяется идентификатором.
Информационные данные.
Передаваемые данные могут быть длиной от двух до восьми байтов.
Проверочная сумма.
Проверочная сумма, это метод проверки подчиненными модулями были ли переданные сообщения
правильно приняты, или имелись ли помехи во время передачи, что могло изменить данные. Если возникла ошибка в сообщении во время передачи от главного модуля на подчиненный модуль, т.е. если проверочная сумма, высчитанная подчиненным модулем не совпадает, то подчиненный модуль сотрет сообщение и будет ждать следующего сообщения от главного модуля.
Подчиненный модуль не передает подтверждения о правильном принятии сообщения. Главный модуль считывает сообщение, передаваемое по шине LIN и сравнивает прочитанное сообщение с переданным.
Если переданное и обнаруженное сообщение одинаковы, то Главный модуль определяет это как правильно принятое подчинненым модулем сообщение.
Так же как и шина CAN, шина LIN в случае повреждения ремонтируется путем скрутки или сращивания проводов.
Шина MOST (Media Oriented Systems Transport)
MOST — это оптическая сеть, которая встраивается в автомобиль во время сборки вместе с проводкой. Проводники MOST соединяют все мультимедийные приборы, имеющиеся в информационно-развлекательной системе.
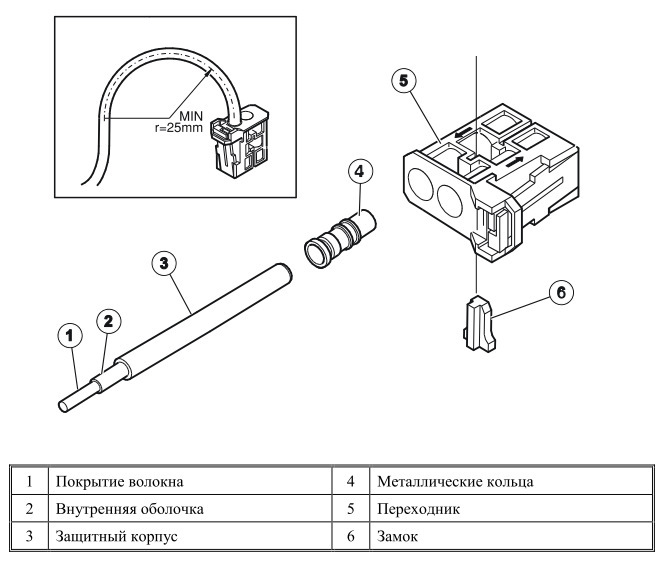
Технология MOST основана на применении пластикового волоконно-оптического кабеля, формирующего сеть и соединяющего компоненты аудио- и мультимедийной системы. Каждый блок кольцевой сети подсоединен к пластиковому волоконно-оптическому кабелю через устройство, называемое волоконно-оптическим приемопередатчиком (FOT). Каждый FOT имеет два оптических соединения – одно из них чувствительно к свету и является входом, а другое – формирует источник света и является выходом.
Если отсоединить разъем шины мост, то Вы увидите в одном из контактов красный свет.

1. Сенсорный экран 2. Встроенный аудиоблок 3. Блок усилителя аудиосистемы 4. Блок управления ТВ 5. Блок управления цифрового радиовещания 6. Блок управления навигационной системой 7. Блок управления мультимедийной системой задней части салона 8. Панель приборов 9. Диагностический разъём кольца MOST
В отличие от CAN в MOST используется топология кольца, в соответствии с чем данные посылаются по кольцу к следующему модулю до тех пор, пока они не достигнут места первоначального старта.
Толчком для создания системы MOST, которая была разработана автомобильной промышленностью, послужила необходимость передачи большого количества информации в рамках одной и той же сети.
1. MOST был создан специально для мультимедийных систем.
2. MOST оптимизирует передачу цифровой информации посредством оптического волокна в так
называемых ринговых (кольцевых) сетях.
— Информация может посылаться по проводнику только в одном направлении.
— Если сеть разомкнута, т.е. 'сломано кольцо', система не будет работать.
3. Информация в форме данных, аудио- или видеосигналов посылается как импульсы или вспышки
через оптическое волокно.
4. Скорость передачи — 25 Мб/сек.

Проводник шины MOST
В отличии от обычных проводов, шину MOST нельзя сильно подвергать изгибам
Аудиосигналы и сигналы управления передаются по кольцевой сети MOST и могут быть приняты любым системным блоком. Например, команды водителя/пассажира, вводимые через сенсорный экран в ходе настройки/выбора радиостанции, передаются по сети MOST и поступают во встроенный звуковой блок, который затем выбирает нужную радиостанцию.
Эта шина ремонтопригодна, но для её ремонта необходимо специальное оборудование. Для диагностики этой шины есть специальные тестеры. Тестер можно подключить к кольцевой сети в любой точке для проверки целостности сети. Отсоединив соединитель MOST, можно проверить, виден ли красный свет.
В отличие от медных проводов, которые передают вольтовые сигналы, оптические провода передают информацию при помощи световых сигналов.
Подключение системы MOST к панели приборов позволяет отображать аудиоданные, данные системы навигации, телефона и голосового управления на TFT-дисплее панели приборов.
Главный блок
Функции главного прибора включают в себя:
− Преобразование сообщений MOST и CAN.
− Мониторинг конфигурации.
− Включение системы, ее проверку и выключение.
− Слежение за работой MOST.
− Обработка сигналов о неисправности.
Функционирование как переходник из CAN
Прочие приборы подчиняются главному прибору.
— К сети MOST можно подключить 64 различных прибора.
— Каждый прибор содержит локальный список сигналов о неисправности.
Шина Flexray
FlexRay решает текущие и будущие задачи обеспечивая новое поколение систем, таких как: трансмиссия; активное управление шасси; тормозные системы и рулевое управление; управление по проводам с высокой скоростью и надёжностью передачи данных.
Более совершенное управление и системы безопасности (многофункциональные датчики, привода и электронные модули управления) — начинают требовать производительности передачи данных и одновременно синхронизации данных в модулях, которая находится за пределами возможностей существующего стандарта CAN.
Стандарт сетевой коммуникации для автомобилей FlexRay предоставляет фундамент, на котором формируется структура контроля автомобильной электроники на много лет вперед. FlexRay служит следующим шагом после CAN и LIN, обеспечивая ещё более надежное управление многими функциями безопасности и комфорта.
FlexRay сфокусирован на основных потребностях в сегодняшней автомобильной промышленности, включая более высокие скорости передачи данных, чем в предыдущих стандартах, гибкие системы передачи данных, универсальные варианты топологий, и отказоустойчивое функционирование.
FlexRay таким образом, обеспечивает скорость и надежность, требуемую для систем управления следующего поколения находящихся внутри автомобиля.
Сеть CAN достигла своего предела производительности с максимальной скоростью 1 Мбит/с.
FlexRay с максимальной скоростью передачи данных 10 Мбит/с, доступных по двум каналам, предлагает в 10 раз более широкую полосу пропускания, чем CAN, используемый в том же самом приложении/функции.
При этом во многих аспектах FlexRay разработан таким образом, чтобы сдержать затраты, обеспечивая максимальную производительность при работе в условиях сложной окружающей среды. FlexRay использует неэкранированную витую пару, соединяющую модули вместе. Дифференциальный сигнал на витой паре cнижает влияние внешних помех без дополнительного дорогостоящего экранирования.
В отличии от шины CAN и MOST, шина flexray имеет разные варианты топологии

Как и в шине CAN в шине Flaxrey имеются оконечные модули с сопротивлением. 2 оконечных блока имеют сопротивление 102 Ом, остальные блоки имеют сопротивление 2,6 кОм.

— Блок управления двигателем
— Блок управления АКПП
— Блок управления РК
— блок управления SRS
— блок управления кузовом
— блок помощи при парковке
Схема подключения шины Flexray выглядит так:

Flexray
Как писал выше, будущее за шиной Flexray:
— высокоскоростная
— предопределённая по времени
— устойчивая к ошибкам
Шина Flaxray, так же как и шина CAN и LIN в случае повреждения ремонтируется методом скрутки или при помощи "обжимки".
Надеюсь данная статья будет Вам полезна, если понравилось ставьте лайк. Если есть вопросы то задавайте в комментариях.
По всем вопросам звоните:
📞 +7(495)778-65-86 с 9:00 до 21:00
Тех. центр Volvo
📍 56 км. МКАД, внутренняя сторона. Торговый центр Мирус-Авто
📍Беломорская д. 9
📍ул. Большая Семеновская, строение 1.
📍Каширское шоссе, д.61, АТЦ "Москва", 4 этаж, сектор 9-А
📍ул. Поморская д. 3
Технические центры Land Rover:
📍 56 км. МКАД, внутренняя сторона. Торговый центр Мирус-Авто
📍ул. Большая Семеновская, строение 1.
Сайт: 77volvo.ru / 77max.ru
Наша страничка в instagram: www.instagram.com/77volvo/
Наша страничка вКонтакте: vk.com/77volvo
Наш канал в телеграмм: t.me/volvo77ru
Если есть какие-то вопросы, мы с удовольствием ответим на них.
Спасибо за внимание! Ваш 77Volvo / 77Max 😉
